计算机概述
- 吞吐量:系统在单位时间内处理请求的数量
主要取决于主存的存取周期 - CPU时钟周期(节拍脉冲,T周期):最小时间单位
每个动作至少一个时钟周期 - 主频:CPU时钟频率,时钟周期的倒数
- CPI:执行一条指令所需要的时钟周期数
- CPU执行时间,运行一个程序所花费的时间
$ CP执行时间 = \frac{CPU时钟周期数}{主频} = \frac{指令条数*CPI}{主频}$ - MIPS:每秒执行多少百万条指令
$MIPS = \frac{指令条数}{执行时间*10^6}=\frac{主频}{CPI}$
$指令周期=\frac{1}{MIPS}$ - 程序员可见的寄存器:
- 状态寄存器
- 通用寄存器
- 程序员不可见(透明)的寄存器:
- IR
- MAR
- MDR
数据的表示与运算
BCD码:
- 8421码: 1010 ~ 1111 六个无效码,区间位于此的要+6修正
- 余3码: 在8421码的基础上加上(0011)2
- 2421码
ASCII码:
数字0 ~ 9 ===> 48 ~ 57
共7位
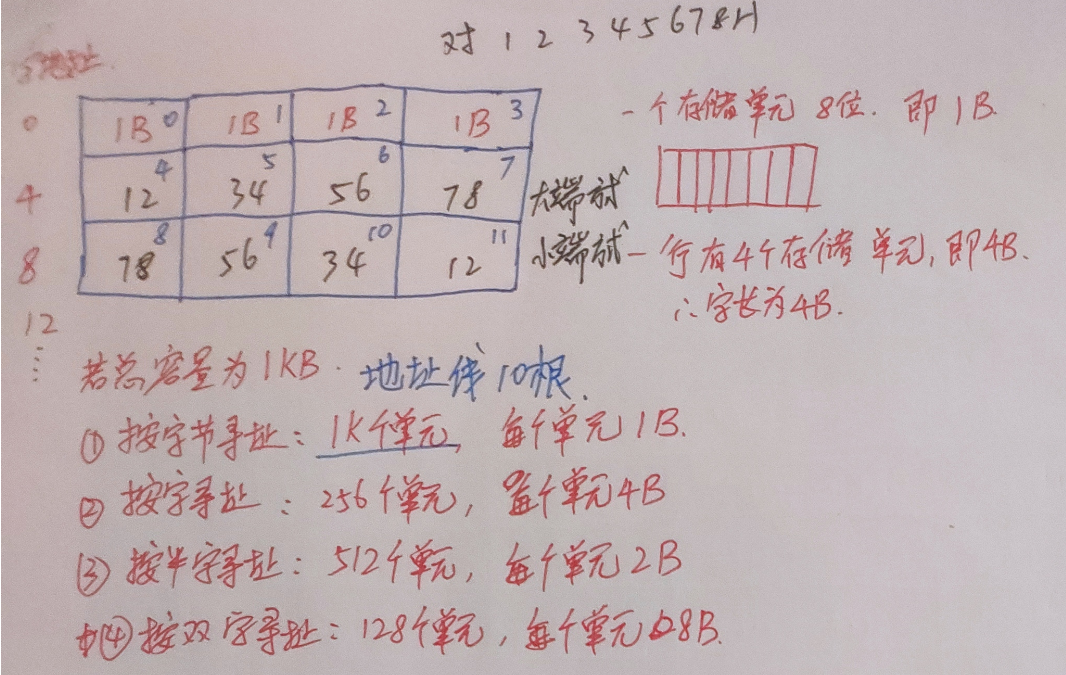
大端存储
高位字节向低位字节顺序存放,符合人类思维
码距
各位异或之后结果为1的个数
奇偶检验码
码距为2
海明校验码
$海明不等式:2^r \geq n+r+1(其中n为信息位,r为冗余信息位)$
$纠错理论: L-1 = D+C且D \geq C(其中L为码距,D为检错的位数,C为纠错位数)$
循环冗余码(CRC)
此处的知识点与计算机网络一样
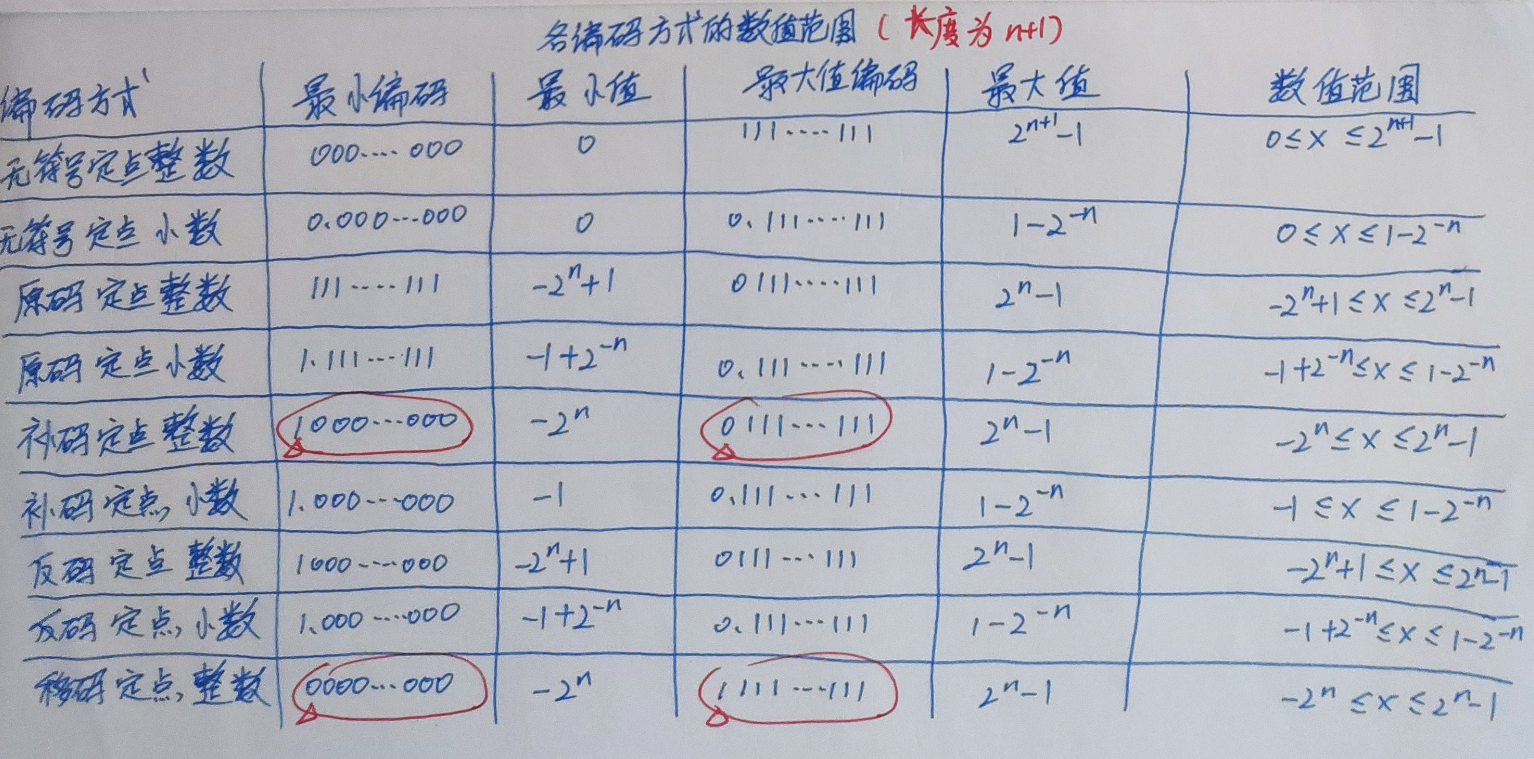
定点小数
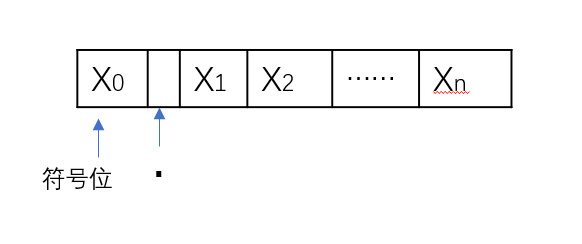
$01…1 ===> 最大正数: 1-2^{-n}$
$11…1 ===> 最大负数: -(1-2^{-n})$
定点整数
最大正数:$2^n-1$
最小负数:$-(2^n-1)$
原码
小数:
$$ [x]_{原码}=\left{
\begin{array}{rcl}
x & & {0 \leq x < 1}\
1-x = 1+|x| & & {-1 < x \leq 0}\
\end{array} \right. $$
对于负小数:
$x=-0.x_1x_2…x_n$
$[x]_{原码} = 1.x_1x_2…x_n$
对n+1字长:
$-(1-2^{-n}) \leq x \leq 1-2^{-n} 原点对称$
真值0有$+0$和$-0$两种表示
补码
小数:
$$ [x]_{补码}=\left{
\begin{array}{rcl}
x & & {0 \leq x < 1}\
2+x=2-|x| & & {-1 \leq x < 0}\
\end{array} \right. $$
整数:
$$ [x]_{补码}=\left{
\begin{array}{rcl}
0,x & & {0 \leq x < 2^n}\
2^{n+1}+x=2^{n+1}-|x| & & {-2^n \leq x \leq 0}\
\end{array} \right. $$
对小数而言:多了一个-1 ===> 1.0000
整数:比原码多了一个$-2^n$
反码
小数:
$$ [x]_{反码}=\left{
\begin{array}{rcl}
x(正数不变) & & {0 \leq x < 1}\
(2-2^{-n})+x & & {-1 < x \leq 0}\
\end{array} \right. $$
范围:$-(1-2^{-n}) \leq x \leq 1-2^{-n}$
原点对称 ===> 真值0的反码不唯一
- 0.000…
- 1.111…
移码
$[x]_{移码} = 2^n +x(字长为n+1)$
$x_1 = +10101~~~x_2=-10101(字长为8)$
$[x1]{移码} = 2^7+10101 = 1,0010101$
$[x2]{移码} = 2^7+(-10101) = 0,1101011$
特点:
- 零的表示唯一
- 与补码相差一个符号位
$[x]{补码} = [x]{移码}的符号位取反$ - 全0表示最小值:$-2^n$
全1表示最大值:$2^n-1$ - 保持数据原有的大小顺序
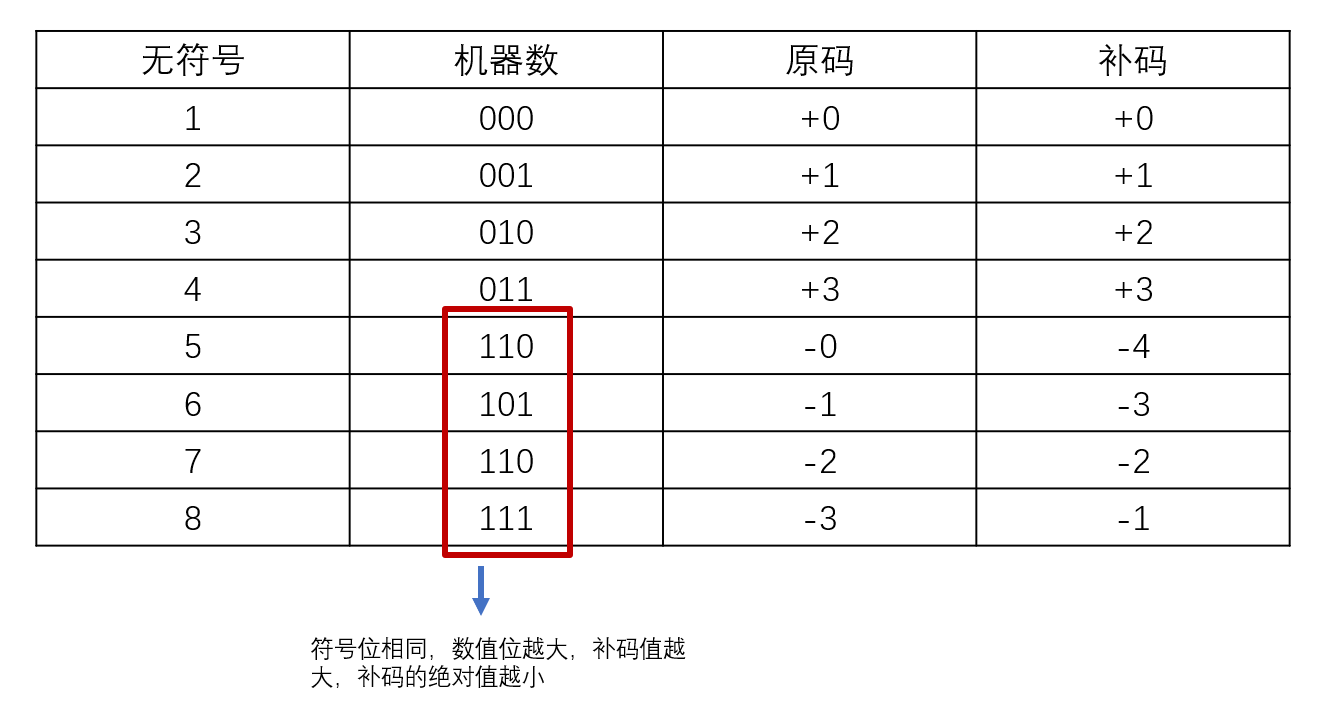
数值表示之间的关系

当$x$为正数时:
$x = [x]{原码} = [x]{反码} = [x]_{补码}$
定点数的移位运算
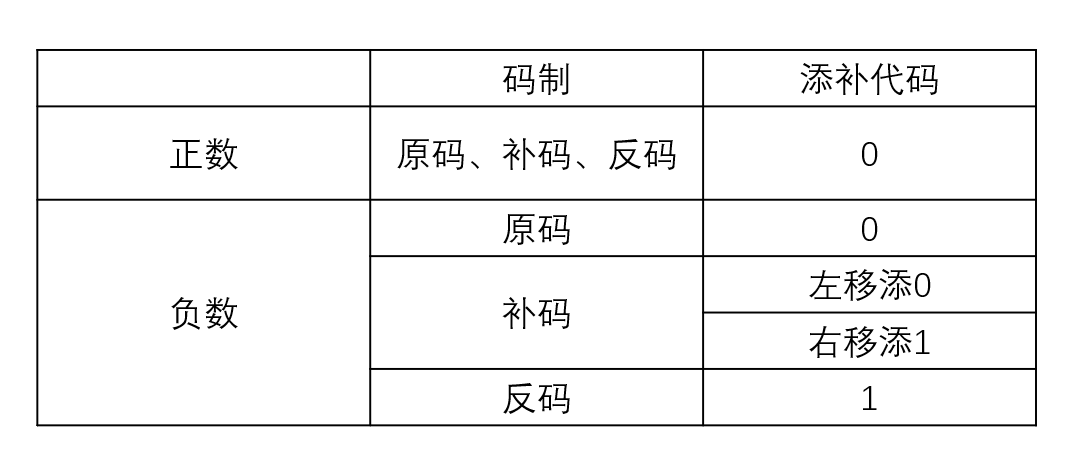
逻辑移位不管左移还是右移,都添加0
符号拓展
- 原有形式的符号位移到新形式的符号位上
- $$ 负数\left{
\begin{array}{rcl}
原码:补0 & & {}\
补码:整数补1,小数补0 & & {例如:-1101 ==> 0011 ==> 1[111]_{补1}0011}\
反码:补1
\end{array} \right. $$
溢出判断
- 符号位
- 参加操作的两个数,符号相同,结果又与原操作数符号不同,则溢出
- 双符号位
- 01 正溢出
- 10 负溢出
- 一位符号位与数据位的进出
- $V = C_s \bigoplus C_1 ~~~~ 若v=0 ~~无溢出(相同), 若v=1 ~~则溢出(相异)$
各个码制之间关系的实例
规格化浮点数
左规:可能多次
右规:只用一次
原码规格化:
$ \frac{1}{2} \leq M \leq (1-2^{-n}) $
$-(1-2^n) \leq M \leq -\frac{1}{2}$补码规格化:
$\frac{1}{2} \leq M \leq (1-2^{-n})$
$-1 \leq M \leq -(\frac{1}{2} +2^{-n}) ===> -(0.100…1) ===> \frac{1}{2} + … +\frac{1}{2^n}$
不同基数之间的特点
基数为2:
- 原码:尾数最高为1
- 补码:尾数最高位与尾数符号位相反
基数为4:
- 原码:最高2位不全0
基数为8:
- 原码:最高3位不全0
- 补码:负 -> 前三位不全1
IEEE 754
单精度float ===> 32位
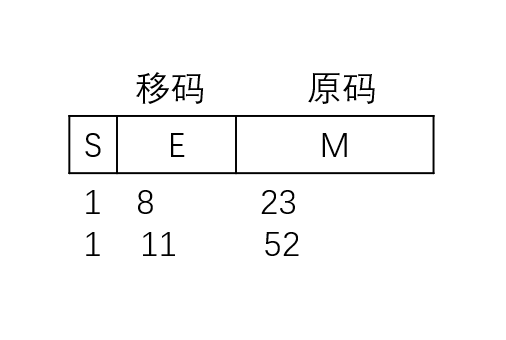
$(-1)^s1.M2^{E-127} ~~~~E\in[1, 254]$
规定:
- $E = 0且M=0,真值0$
- $E = 0且M\not=0,非规格化,真值=(-1)^s0.M2^{-126}$
- $1 \leq E \leq 254~~~ 真值=(-1)^s1.M2^{E-127}$
- $E = 255且M \not=0时,真值为‘NAN’ $
- $E=255且M=0,表示正无穷或负无穷(看符号位)$
| 格式 | 最小值 | 最大值 |
|---|---|---|
| 单精度 | $E=1,M=0,1.0*2^{1-127}=2^{-126}$ | $E=254,M=1.11…,1.111…*2^{254-127}=2^{127}(2-2^{-23})$ |
| 双精度 | $E=1,M=0,1.0*2^{1-1023}=2^{-1022}$ | $E=2046,2^{1023}*(2-2^{52})$ |
存储系统
SRAM
静态随机存储器
双稳态触发器(六管Mos)、非破坏性读出、易失性、集成度低
DRAM(动态)
电容、一次刷新一行存储单元
- 集中刷新,有访存“死区”
- 分散刷新
- 异步刷新
DRAM采用地址复用技术(以及ROM)
SRAM不采用
ROM(密度高、非易失性)
- MROM: 写入后无法修改
- PROM:可编程
- EPROM:可擦除可编程
- 闪速存储器
- 固态硬盘(SSD)
字位拓展
注意$\overline{CS}$为低电平有效
地址分配与片选
线选法
n条线 —> n个选片信号
电路简单、地址空间不连续译码片选法(使用译码器)
n条线 —> $2^n$个选片信号
电路复杂,地址空间连续,可加逻辑设计
双端口RAM
可行:
- 两个端口不同时对同地址存取
- 两个端口同时对同地址读
不可行:
- 同时对同地址写
- 同时对同地址,一个读,一个写
多模块
- 单体多字,一次取多字
- 多体并行
- 高位交叉(体号+体内地址)
连续取$n$个字:$T_总 = n*T_单$ - 低位交叉(体内地址+体号)
连续取$n$个字:$T_总=T_单+(n-1)\tau(\tau为启动下一个存储器时间,即总线传送周期)$
$当字长为W时:带宽= \frac{nW}{T+(n-1)\tau}$
- 高位交叉(体号+体内地址)
Cache和主存的映射
直接映射:主存数据块放Cache中唯一位置
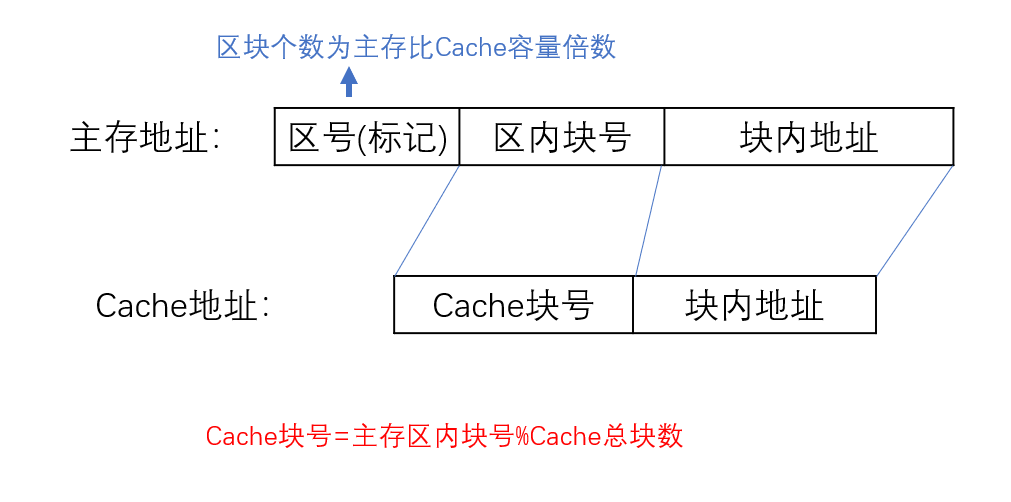
地址变换:主存地址 ===> Cache中的地址
- 取主存块号 ===> 找到Cache块号
- 比较Cache块号中的区号(标记)与主存的区号(标记)是否一致
- 若是,则主存的区块号+块内地址 = 访问Cache的地址
全相联映像:主存数据块随意放在Cache中
地址变换:
- 取主存块号 —> 与标识Cache(标识Cache可能是一个存放一张表的Cache)全表比较
- 若找到,则取出Cache块号
- Cache块号 + 块内地址 = 访问Cache的地址
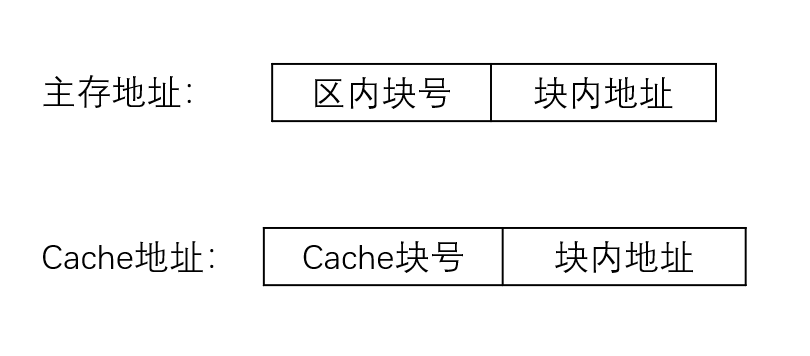
组相联映像:只能放特定组,组内可以随意放
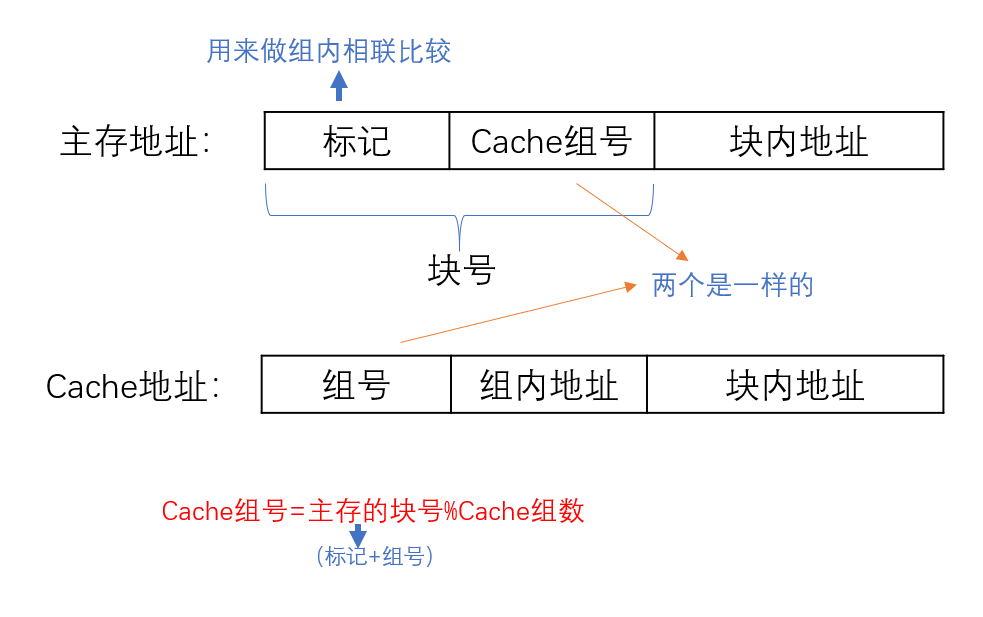
地址变换机构:
- 取出主存地址的块号,取余,得到Cache的组号
- 通过组号在标识Cache中找到对应的组
- 一般一个组有好几块,用主存的标记与该组中的每一块作比较,看是否命中
- 若命中,则取出标识Cache中的组内块号
- Cache地址 = 组号 + 组内地址 + 块内地址
Cache写策略:
Cache命中
- 全写法:数据同时写入Cache和主存
- 写回法:先只修改Cache内容,换出时才写回主存
不命中
- 写分配法:加载主存的块到Cache中
- 非写分配法:只写入主存,不进行调块
写分配法 ===> 写回法
非写分配法 ===> 全写法
指令系统
概述
- $访存次数 = 取指令一次+取操作数n次+回存一次$
- $设地址长度为n,上层留出m种状态,下层可多拓展m*2^n种状态$
地址格式
- 零地址
- 一地址
- $OP(A_1)
–>A_1(三次访存)$ - $(隐含)
(ACC)OP(A_1)–>~~ACC(两次访存,结果放寄存器中)$
- $OP(A_1)
- 二地址
- $(A_1)OP(A_2)
–>A_1(四次访存)$
- $(A_1)OP(A_2)
- 三地址
- $(A_1)OP(A_2)~~–>A_3(四次访存,取址一次,取操作数两次,回存一次)$
- 四地址:
- $(A_1)OP(A_2)
–>A_3~A_4为下一条指令执行地址(四次访存)$
- $(A_1)OP(A_2)
寻址方式:EA表示操作数的有效地址
隐含寻址(0次访存):另一个操作数隐含在了$ACC$中
- $(ACC)OP(A_1)
–>ACC$
- $(ACC)OP(A_1)
立即(数)寻址(0次访存):地址字段直接就是操作数本身
直接寻址(一次访存):地址$A$就是$EA$
- 地址位数为$k$,寻址范围为$2^k$
间接寻址(两次访存):$EA=(A)$
- 字长为$m$,寻址范围$2^m$
寄存器寻址(0次访存):
- 直接寻址的主存换成了寄存器
寄存器间接寻址(一次访存):
- 间接寻址的第一步是找到寄存器
相对寻址(一次访存):
- PC的内容加上指令格式中的形式地址A而形成操作数的有效地址
- $EA = (PC) + A$
- $A$的位数决定了操作数的寻址范围
- 便于程序浮动
- 转移指令
基址寻址(一次访存):
- $EA = (BR)+A$
- 面向操作系统,基址寄存器内容不变,形式地址可变(作偏移)
- 扩大寻址范围
- 有利于多道程序设计
- 可编制浮动程序
变址寻址(一次访存):
- $EA=(IX)+A$
- 寄存器位数/字长$m$,寻址范围$2^m$
- 面向用户,变址寄存器内容可由用户改变,形式地址$A$不变
- 扩大了寻址范围
- 适合编制循环变量(数组)
混合的寻址方式
- 先变址后间址:$EA=(A+(IX))$
- 先间址后变址:$EA=(A)+(IX)$
- 变址基址一起: $EA=A+(BR)+(IX)$
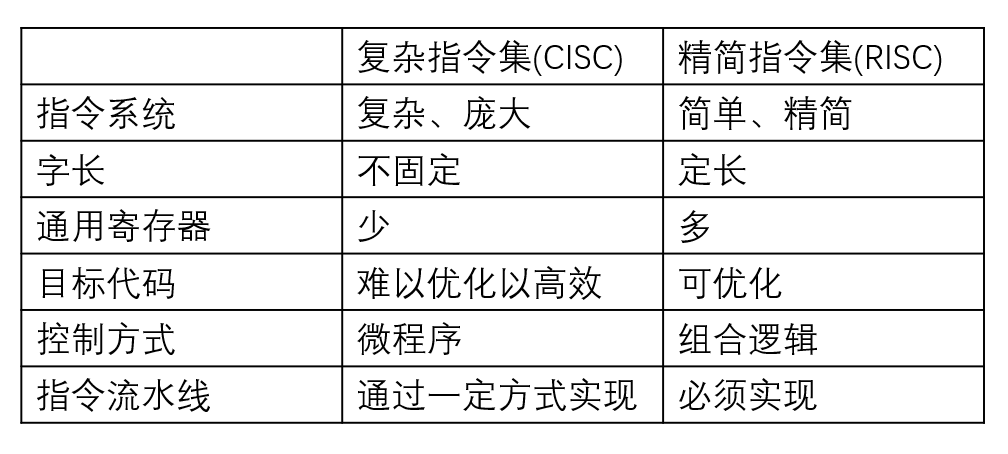
复杂指令集(CISC)和精简指令集(RISC)
中央处理器
运算器
- 算术逻辑单元(ALU)
- 暂存寄存器
- 累加寄存器(ACC)
- 通用寄存器组
- 程序状态字寄存器(PSW)
- 移位器
- 计数器(CT)
控制器
- 程序计数器(PC)
- 指令寄存器(IR)
- 指令译码器(ID)
- 存储器地址寄存器(MAR)
- 存储器数据寄存器(MDR)
- 时序系统
- 微操作信号发生器
- 中断控制逻辑
指令部件包括:PC、IR、ID
寄存器
用户可见:
- PC
- PSW
- ACC
- R0/R1/R2/R3
用户不可见:
- MAR
- MDR
- IR
CPU
- ALU
- 寄存器
- 中断系统
- 时序控制(CU)
指令周期
完成一条指令:
- 取址周期:取址、分析
- 执行周期:执行指令
$时钟周期 < 机器周期 < 指令周期$
一般一个阶段对应一个机器周期
一个机器周期存在若干个时钟周期
指令译码是对指令的操作码字段进行译码的
指令周期的数据流
取址周期:
- PC ==> MAR ==> 地址总线 ==> 主存
- CU发出控制信号 ==> 控制总线 ==> 主存
- 主存 ==> 数据总线 ==> MDR ==> IR
- CU发出读命令 ==> PC+1
间址周期
- Ad(IR) ==> MAR ==> 地址总线 ==> 主存
- CU发出读命令 ==> 控制总线 ==> 主存
- 主存 ==> 数据总线 ==> MDR
执行周期
不定
中断周期
- CU控制SP-1,SP ==> MAR ==> 地址总线 ==> 主存
- CU发出写命令 ==> 控制总线 ==> 主存
- PC ==> MDR ==> 数据总线 ==> 主存(断点存入主存)
- CU(中断服务程序入口地址) ==> PC
指令执行流程
固定的前三步:
- (PC) ==> MAR, READ
- (PC)+1 ==> PC
- (M ==> MDR) ==>IR
微指令
- 一条机器指令就是一个微程序
- 一个微程序包含若干个微指令
- 一条微指令包含若干微操作
- 一个微操作 = 一个微命令
指令系统中具有$n$种机器指令,则微程序数至少为$n+1$个
其中的$1$为公共的取址微程序,若带中断,再$+1$
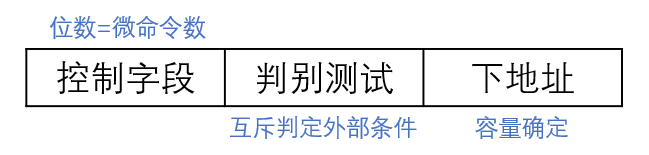
微指令编码方式
- 直接编码方式:(又快又长)
字段种的每一位都代表一个命令 - 字段直接编址方式(慢)
需要译码电路译码- 互斥性微命令放同一段,相容性微命令放不同段(同时执行)
- 留一个状态位,即 ==> 若有三位,则只能表示7个互斥微命令
- 字段间接编码
微指令格式
水平型微指令:
定义并执行几种并行的基本操作- 微程序短
- 执行速度快
- 微指令长
垂直型微指令
定义并执行一种基本操作- 微程序长
- 执行速度慢
- 微指令短
混合型微指令
垂直 + 简单并行
微程序控制单元
因为微指令的地址均由上一条微指令的下地址字段直接给出
所以每一条微指令都要加一个将微指令下地址字段送到CMAR的微操作
$取址:$
$T_0:PC \rightarrow MAR, 1 \rightarrow R$
$T_1:Ad(CMDR) \rightarrow CMAR$
$T_2:M(MAR) \rightarrow MDR,(PC) + 1 \rightarrow PC$
$T_3:Ad(CMDR) \rightarrow CMAR$
$T_4:MDR \rightarrow IR$
$T_5:PC(IR) \rightarrow 微地址形成部件 \rightarrow CMAR$
指令流水线:
$取址 \rightarrow 分析 \rightarrow执行$
- 顺序执行:$T=3nT$
- 一次叠加执行:$T=3t+(n-1)2t=(1+2n)t$
- 二次叠加执行:$T=3T+(n-1)T=(2+n)t$
影响因素
- 结构相关(资源冲突)
多条指令同一时刻争用同一资源 ===> 资源重复配置 - 数据相关(数据冲突)
存在先后顺序,前一个完成才能执行后一个 ===> 数据旁路技术- 读后写(WAR):乱序发射
- 写后读(RAW):后续指令用到相关数据
- 写后写(WAW,写的是两个不同指令):各个功能部件
- 控制相关
转移指令,其他改变PC值的指令
性能指标
吞吐率
$TP = \frac{n}{T_k}(n个任务,T_k为完成总时间)$
$TP = \frac{n}{(k+n-1)\Delta t}(k为流水线段数,\Delta t是时钟周期)$
$当n \rightarrow \infty 时,TP=\frac{1}{\Delta t}$加速比
$S= \frac{T_0}{T_k}(T_0为不使用流水线时间,T_k为使用流水线时间)$
$S= \frac{kn \Delta t}{(k+n-1) \Delta t} = \frac{kn}{k+n-1}$
$当n \rightarrow \infty 时,S_{max} = k$效率
$E = \frac{n个任务有效面积}{时空总面积} = \frac{T_0}{kT_k}$
$当n \rightarrow \infty 时,E_{max} = 1$
总线
系统总线
- 数据总线(双向)
- 地址总线(单向)
- 控制总线
工作频率:一秒内传递几次数据
$若总线周期 = N个时钟周期$
$则总线工作频率=\frac{时钟频率}{N}$
$总线带宽 = 总线工作频率*\frac{总线宽度}{8}$
集中仲裁方式
- 链式查询方式(3条线,请求线1,总线忙1,总线允许1)
顺序查询每一个设备,离总线控制器越近,优先级越高- 简单,易拓展,优先级固定
- 电路敏感
- 优先级不灵活
定时器定时查询方式($\lceil log_2n \rceil +2 $条线,请求1,总线忙1,总线允许$\lceil log_2n \rceil $)
有请求 ==> 计数器计数 ==> 值与请求设备一致- 优先级灵活
- 线多复杂
独立请求方式(2n+1条线,请求n,允许n,忙1)
每一个设备都有一个请求线$BR_i$和总线允许线$BG_i$- 响应快,优先级灵活
- 线多复杂
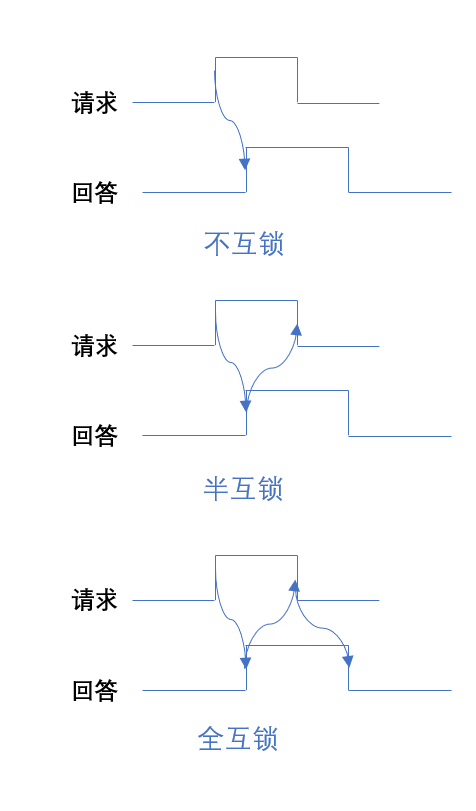
总线异步定时方式(按需分配时间)
总线标准
- ISA: 最早微机系统总线
- EISA: 扩展ISA(32位)
- VESA: 局部总线,活动图像,多媒体
- PCI: 局部总线,外围部件,显卡,声卡,网卡
- PCI-Express: 取代PCI、AGP
- AGP: 局部总线,视频接口
- RS-232C: 串行二进制,数据终端与通信
- USB: 设备总线,串行
- PCMCIA: 笔记本电脑
- IDE: 磁盘驱动器
- SCSI: 智能设备(硬盘、软盘、光驱、打印)
- SATA: 硬盘接口,行业标准
输入/输出系统
显式存储器
$VRAM容器 = 分辨率 灰度级位数$
$VRAM带宽 = 分辨率 灰度级位数 * 帧频$
磁盘
$存取时间 = 寻道时间 + 旋转延迟时间 + 传输时间$
$数据传输率D_r = rN(r为转速,r转/秒,N为每个磁道N个字节)$
地址格式:
| 驱动器号(磁盘) | 柱面(磁道)号 | 盘面号 | 扇区号 |
| —- | —- | —- | —- |
冗余阵列
RAID0 无容错能力
I/O接口的基本结构
- 内部接口:与内存,CPU相连(并行)
- 外部接口:外设相连(串行)
I/O端口编址
统一编址:存储器映射
- 优点:不需要专门的I/O指令,灵活、方便、编址空间大
- 缺点:内存容量变小,执行速度慢
独立编址:I/O映射方式
- 优点:程序编制清晰,易理解
- 缺点:要专门的I/O指令,控制更复杂
I/O方式
与操作系统中一致
中断处理过程
- 关中断
- 保存断点
- 识别中断源
- 保存现场
- 中断事件处理
- 恢复现场
- 开中断
- 中断返回
其中,前三步由硬件完成,又称中断隐指令,后四步又软件(操作系统完成),又称为中断服务程序